Новые драйверы семейства VFD от MEAN WELL для трехфазных бесколлекторных двигателей
22 октября 2024

Игорь Елисеев (г. Химки)
Новая линейка драйверов трехфазных бесколлекторных двигателей семейства VFD производства компании MEAN WELL, представленных в открытом и закрытом исполнениях, а также плата управления ими представляют собой готовое комплексное решение с высоким КПД для управления электродвигателями бытовой техники, вентиляторных установок, насосных станций, конвейерных лент, станков, беспилотной авиации и индивидуального электротранспорта.
Бесколлекторные электродвигатели обладают целым рядом неоспоримых преимуществ по сравнению с их обычными (коллекторными) собратьями. В первую очередь это связано с отсутствием коллекторно-щеточного узла, который всегда являлся главным источником проблем для электрических двигателей традиционной конструкции. Щеточный узел коллекторного двигателя подвергается внушительному износу в процессе эксплуатации, что со временем неизбежно приводит к ухудшению или к полной потере электрического контакта и, соответственно, к выходу мотора из строя. Вследствие этого, необходимо постоянно мониторить состояние двигателя, и периодически или по мере необходимости производить работы по замене изношенных деталей. Сильное трение в месте контакта щеток с коллектором обусловливает существенное снижение КПД электромотора, а искрение в контактной зоне вызывает обгорание контактов, создает радиопомехи и может привести к катастрофическим последствиям при эксплуатации в зонах повышенной взрывопожароопасности.
Бесколлекторные двигатели лишены этих недостатков. Они характеризуются высоким КПД (до 90%), малым тепловыделением и низким уровнем шума, способны развивать большие скорости вращения, недостижимые для коллекторных моторов – до нескольких сотен тысяч оборотов в минуту, не требуют дополнительного обслуживания в процессе эксплуатации, а их срок службы ограничен разве что ресурсом подшипников на валу ротора. Благодаря отсутствию коллектора – достаточно сложного в изготовлении и относительно громоздкого элемента – такие двигатели намного проще в конструктивном плане и, кроме того, отличаются меньшим весом, компактными размерами и разнообразием форм.
Бесколлекторный мотор, как и любой электродвигатель, конструктивно состоит из двух основных частей – подвижной, вращающейся (ротора) и неподвижной, стационарной (статора). При этом возможны три варианта их взаимного расположения: Inrunner, когда ротор находится внутри статора; Outrunner, когда ротор вращается вокруг статора; и Axial – при соосном (один над другим) расположении этих элементов. Независимо от варианта исполнения, ведущая роль в бесколлекторных двигателях всегда принадлежит статору, который содержит три независимые обмотки (по количеству фаз), предназначенные для формирования вращающегося магнитного поля, приводящего в движение ротор. Последний чаще всего состоит из набора постоянных магнитов, либо содержит короткозамкнутую обмотку, которая взаимодействует с вращающемся полем статора посредством вторичной индукции. В первом случае (с магнитами) ротор вращается точно с той же скоростью, что и магнитное поле. Такие двигатели получили название синхронных. Во втором случае частоты вращения магнитного поля и ротора не совпадают (ротор всегда отстает). Эти двигатели называются асинхронными.
На рисунке 1 представлена схема простейшего трехфазного синхронного бесколлекторного двигателя с ротором на постоянном магните и показаны несколько последовательных стадий его рабочего цикла.
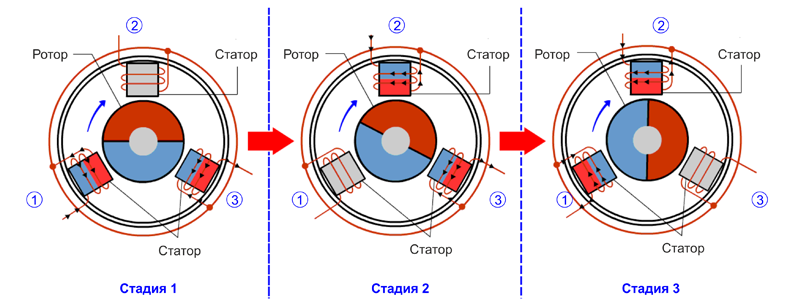
Рис. 1. Несколько стадий рабочего цикла простейшего трехфазного синхронного бесколлекторного двигателя
Сила, порождаемая взаимодействием магнитных полей и приводящая в движение ротор бесколлекторного двигателя, базируется на фундаментальном физическом явлении отталкивания одноименных полюсов магнитов и притяжения разноименных. На рисунке 1 полюса магнитов обозначены красным и синим цветами. В зависимости от соотношения цветов в зонах близкого контакта ротора с электромагнитами статора, можно судить о том, силы какого характера (притяжения, отталкивания или обе сразу) действуют между ними в данный момент. Неактивные статорные электромагниты (по их обмоткам не протекает ток и они, соответственно, не индуцируют магнитное поле), обозначенные на рисунке серым цветом, не оказывают влияния на движение ротора.
Рабочий цикл двигателя складывается из ряда последовательных стадий. На каждой из них активизируются две статорные обмотки, причем обязательно в противофазе, а третья непременно отключается до момента перехода к следующей стадии. Какие именно обмотки следует активизировать, а какую нужно отключить – зависит только от текущего положения ротора. А направление вращения ротора будет определяться полярностью активизированных электромагнитов статора. Пример на рисунке 1 демонстрирует, какие именно обмотки статора (и в какой полярности) необходимо активизировать на первых трех стадиях рабочего цикла (после включения двигателя) чтобы обеспечить вращение ротора по часовой стрелке.
Следует обратить внимание на тот факт, что угол, на который поворачивается ротор между соседними стадиями, составляет ровно 60 градусов. Таким образом, за один полный оборот ротора двигатель проходит шесть стадий. Это утверждение справедливо лишь для данного конкретного примера, где ротор образован одним единственным магнитом, а обмотки статора сосредоточены в трех местах. На практике обычно применяются роторы с несколькими магнитами, а обмотки статора разделены на несколько секций, которые равномерно распределены по окружности. На рисунке 2 представлен пример такого двигателя с внешним ротором на 16 магнитах и трехфазным статором, где каждая обмотка разделена на четыре секции.
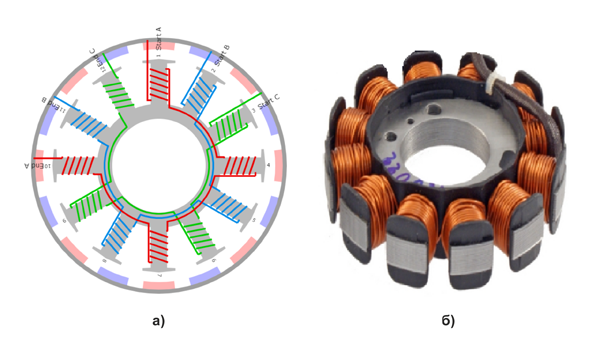
Рис. 2. Схема трехфазного синхронного бесколлекторного двигателя типа BLDC с внешним ротором на 16 магнитах (а) и внешний вид его статора на 12 секций (б)
Тип такого двигателя – трехфазного синхронного бесколлекторного с ротором на постоянных магнитах – обозначается аббревиатурой BLDC (BrushLess Direct Current). Возникает законный вопрос – почему эти моторы называют двигателями постоянного тока? Ведь ток через обмотки статора на разных стадиях рабочего цикла течет то в одном, то в другом направлении. Разве это не является признаком переменного тока? Дело в том, что в начале 60-х годов XX века, когда только стартовало производство первых бесколлекторных двигателей, на рынке безраздельно господствовали коллекторные двигатели постоянного тока. Поэтому производители новых двигателей были вынуждены комплектовать свои изделия всей необходимой электроникой (контроллерами, инверторами, силовыми ключами и датчиками Холла) с тем, чтобы их бесколлекторный вариант мог служить прямой заменой коллекторному, то есть сразу начинал работать при подключении к источнику постоянного тока. Никакой другой возможности продавать свои изделия у этих производителей в то время не существовало – без электронной обвязки бесколлекторный двигатель работать не может, а отдельно такие схемы управления в те годы никем не поставлялись. Таким образом, термин двигатель постоянного тока служил в те времена скорее маркетинговым целям и относился, помимо собственно двигателя, еще и к электронному блоку управления, работающему на постоянном токе.
В наше время бесколлекторные двигатели поставляются, как правило, без какой-либо электроники (если не считать встроенные датчики). Для управления работой этих двигателей компания MEAN WELL разработала специализированную линейку приборов – семейство VFD, включающее силовые элементы (драйверы), модули управления и демонстрационно-тестовое оборудование.
Драйверы семейства VFD представляют собой инверторы, на вход которых подается постоянное или однофазное переменное напряжение, а на выходе формируется трехфазное, предназначенное для питания статорных обмоток бесколлекторных двигателей. Линейка драйверов VFD включает приборы с выходной мощностью от 150 до 750 Вт в нескольких вариантах конструктивного исполнения. Наименование драйверов семейства, структура которого представлена на рисунке 3, содержит номиналы выходных мощности и напряжения, а также букву, обозначающую вариант конструктивного исполнения.

Рис. 3. Структура наименования драйверов семейства VFD
Буква “C” в названии драйвера VFD обозначает закрытый вариант исполнения, в котором печатная плата с компонентами электрической схемы заключена в металлическую оболочку. Это не полноценный корпус, как можно предположить – для подобного исполнения скорее подошло бы название «в кожухе» – конструкция полностью отрыта с двух торцов, где расположены входные и выходные контактные площадки (клеммы), сверху прикрыта тонкой перфорированной пластиной с крупными отверстиями, и лишь снизу и по бокам защищена сплошными металлическими листами, которые, судя по всему, частично выполняют функцию радиатора.
Вариант исполнения с буквой “P” в названии обозначает открытую конструкцию – просто печатную плату с установленными на ней компонентами схемы. В некоторых случаях элементы схемы могут быть частично прикрыты перфорированным кожухом, который в то же время служит радиатором для силовых транзисторов. Входные и выходные контакты в этом варианте исполнения представлены разъемами со штырьковыми выводами.
В зависимости от типа входного напряжения все драйверы семейства VFD подразделяются на две группы – с питанием от источника постоянного тока и подключаемые к сети однофазного переменного тока. Причем все драйверы, относящиеся ко второй группе, в обязательном порядке снабжаются схемами коррекции коэффициента мощности (PFC – Power Factor Correction).
В таблице 1 представлены все драйверы семейства VFD, сгруппированные по типам входного напряжения и вариантам исполнения.
Таблица 1. Драйверы семейства VFD
| Тип драйвера | Модели |
|---|---|
| Драйвер в открытом исполнении с питанием от источника постоянного тока | VFD-150P-48 VFD-250P-48 VFD-350P-48 |
 |
|
| Драйвер в открытом исполнении с питанием от однофазной сети переменного тока | VFD-250P-230 VFD-350P-230 |
 |
|
| Драйвер в закрытом исполнении с питанием от однофазной сети переменного тока | VFD-200C-230 VFD-350C-230 VFD-750C-230 |
 |
Благодаря тому, что все приведенные выше драйверы принадлежат одному семейству, можно выделить целый ряд общих для них характеристик. Кроме того, их схемы подключения к нагрузке, взаимодействие с датчиками и модулем управления, функциональные возможности и многое другое практически ничем не отличаются. Что касается их внутреннего устройства, можно говорить о принципиальных различиях только между категориями приборов, принадлежащих к разным группам по типу входного напряжения.
Драйверы семейства VFD предназначены для управления трехфазными бесколлекторными двигателями. При этом конкретный тип двигателя принципиального значения не имеет. Это может быть мотор типа BLDC, рассмотренный ранее, или широко распространенный асинхронный электродвигатель, известный под названием Induction motor (дословно – индукционный мотор), или относительно новый, но быстро набирающий популярность двигатель типа SynRM (синхронный реактивный двигатель). Эти моторы радикально отличаются типом ротора и принципом работы, но их объединяет одно общее свойство – они все бесколлекторные и их характеристики (направление и скорость вращения, момент на валу) зависят исключительно от направления и силы тока в трехфазных обмотках статора, а следовательно, они могут управляться с помощью драйверов семейства VFD.
Блок-схема драйвера с питанием от источника постоянного тока показана на рисунке 4, а аналогичная схема для драйвера, подключаемого к сети переменного тока – на рисунке 5.
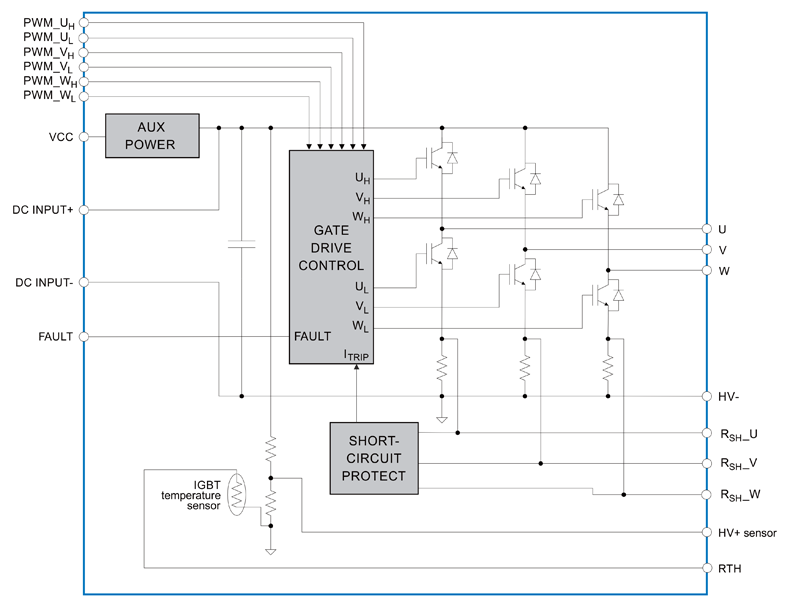
Рис. 4. Блок-схема драйвера семейства VFD с питанием от источника постоянного тока
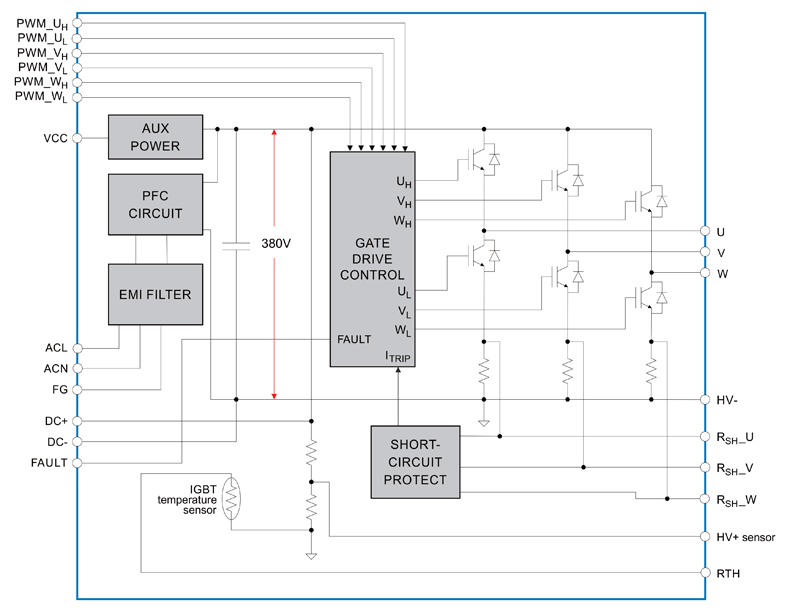
Рис. 5. Блок-схема драйвера семейства VFD с питанием от сети переменного тока
Сравнительный анализ схем, приведенных на рисунках 4 и 5, выявляет, как и ожидалось, их полную идентичность, за исключением входных каскадов. В схеме на рисунке 4 входное напряжение от источника постоянного тока (допустимый диапазон 20…55 В) поступает непосредственно на внутреннюю шину питания драйвера, в то время как в схеме на рисунке 5 сетевое напряжение переменного тока предварительно подвергается сложному преобразованию – оно выпрямляется, обрабатывается схемой коррекции коэффициента мощности и повышается до фиксированного уровня в 380 В. Напряжение с внутренней шины питания посредством выходных силовых ключей поступает непосредственно на выходы драйвера, которые, в свою очередь, подключаются напрямую к обмоткам двигателя. А это означает, что двигатель должен быть рассчитан на данное рабочее напряжение. То есть, к драйверу с питанием от сети можно подключить исключительно двигатели с рабочим напряжением не ниже 380 В, а к драйверу, питающемуся от источника постоянного тока с напряжением N, можно подключать двигатели рассчитанные, соответственно, на напряжение N.
Что касается логики функционирования основной схемы драйвера, то она предельно проста – три выходных каскада (по числу фаз) фактически лишь выполняют роль усилителя мощности для соответствующих сигналов управления, поступающих на входы PWM от внешнего контроллера. Выходные каскады выполнены по полумостовой схеме, где транзисторы каждого плеча получают индивидуальное управление. Соответственно, драйвер имеет шесть входов управления по числу транзисторов в выходных каскадах. Каждый из входов (как видно на схемах) обозначается символами, определяющими его назначение – для какой фазы (“U”, “V” или “W”) и для какого плеча (верхнего – “H” или нижнего – “L”) предназначен этот сигнал. Например, сигнал, обозначенный как “PWM_UH” управляет транзистором верхнего плеча в выходном каскаде фазы U, а сигнал “PWM_UL” предназначен для нижнего плеча того же каскада. Эта пара сигналов (для одной фазы) всегда работает вместе и в противофазе, но не синхронно. Между фронтами этих сигналов обязательно должна быть задержка (минимум 300 наносекунд) для предотвращения возможности возникновения так называемых «сквозных» токов, когда оба транзистора каскада одновременно оказываются в открытом состоянии, что равносильно короткому замыканию. На рисунке 6 представлены графики управляющих сигналов и соответствующего изменения выходного напряжения одного из каскадов драйвера с питанием от сети, где tdead – время задержки, а tsw – период следования импульсов управления.
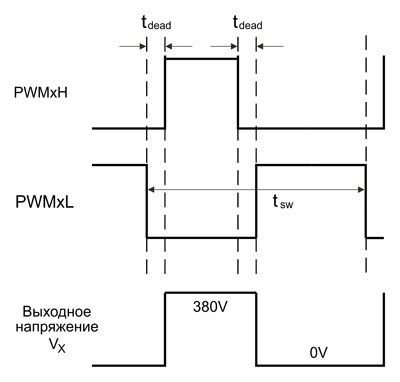
Рис. 6. Графики управляющих сигналов и выходного напряжения оконечного каскада драйвера
Для контроля за величиной выходного тока в цепь каждого оконечного каскада включены постоянные резисторы номиналом 6 мОм для драйверов с питанием от источника постоянного тока и 100 мОм для драйверов с питанием от сети. Напряжение с этих резисторов поступает на встроенную схему защиты от короткого замыкания (“SHORT CIRCUIT PROTECT”) и на выходные контакты RSH_U, RSH_V и RSH_W для внешнего контроля. Если значение выходного тока превысит величину, равную 200% от номинального значения, сработает встроенная схема защиты, и на блок управления ключевыми транзисторами будет отправлен сигнал ITRIP, вызывающий отключение выходных каскадов (рисунок 7). После устранения причины, вызвавшей перегрузку, драйвер автоматически переводится в рабочий режим. Также следует отметить, что кратковременные перегрузки, достигающие 200% от номинального значения выходного тока, не вызывают срабатывания схемы защиты, если их длительность не превышает 5 секунд (это считается штатной ситуацией).
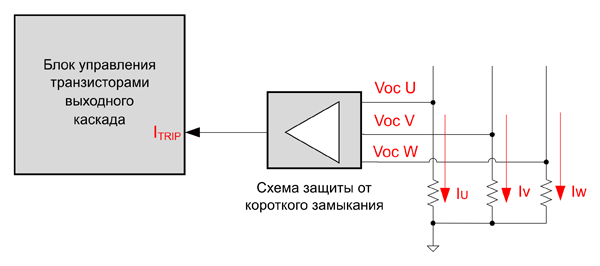
Рис. 7. Схема защиты от короткого замыкания
Для контроля за напряжением на внутренней шине питания предусмотрен специальный вывод, на который выводится часть этого напряжения со встроенного делителя. В драйверах с питанием от источника постоянного тока этот вывод носит название “DC+sensor” (рисунок 4), а в драйверах с сетевым питанием – “HV+sensor” (рисунок 5). Предполагается, что напряжение на этом выводе будет контролироваться внешней схемой управления, и в случае превышения предельно допустимых значений драйвер будет отключаться извне подачей соответствующих сигналов на входы PWM, так как встроенной схемы защиты на этот случай не предусмотрено. Предельное напряжение на внутренней шине питания для драйверов с питанием от источника постоянного тока составляет 60 В, а для драйверов с сетевым питанием 420 В. Значение напряжения внутренней шины вычисляется по формуле:
Vi=Vn×Vs2.5,
где Vi – напряжение на внутренней шине, Vs – напряжение на контрольном выводе (“DC+sensor” или “HV+sensor”), Vn – номинальное напряжение внутренней шины, которое для драйверов с питанием от источника постоянного тока составляет 48 В, а для драйверов с сетевым питанием – 380 В.
Для контроля температуры силовых транзисторов используется встроенный температурный датчик, в качестве которого применяется NTC-термистор (от Negative Temperature Coefficient – терморезистор с отрицательным температурным коэффициентом сопротивления). Так как никаких встроенных схем защиты от перегрева не предусмотрено, предлагается контролировать температуру силовых элементов извне и, в случае необходимости, отключать драйвер сигналами PWM. Рекомендуемая схема подключения внешних устройств ко встроенному температурному датчику показана на рисунке 8.
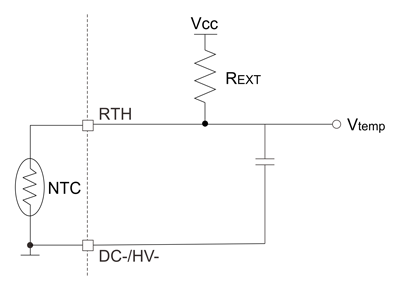
Рис. 8. Рекомендуемая схема подключения ко встроенному температурному датчику
Для питания данной схемы рекомендуется использовать внешний источник питания напряжением 5 В (VCC). При этом резистор REXT должен быть номиналом 4,99 кОм. В этом случае при температуре 45°C сопротивление терморезистора NTC будет составлять 4,88 кОм, а напряжение Vtemp – 2,47 В. В таблице 2 представлены значения сопротивлений терморезистора и напряжений Vtemp при других температурах – максимально допустимых для силовых транзисторов отдельных моделей драйверов VFD согласно рекомендациям производителя.
Таблица 2. Максимально допустимые рабочие температуры силовых транзисторов драйверов VFD
| Модель драйвера VFD | Допустимая температура, максимум, °C |
Сопротивление терморезистора, кОм | Напряжение на выходе рекомендованной схемы, В |
|---|---|---|---|
| VFD-150P-48 | 105 | 0,86 | 0,74 |
| VFD-250P-48 | 115 | 0,69 | 0,61 |
| VFD-350P-48 | 125 | 0,54 | 0,49 |
| VFD-250P-230 | 90 | 1,27 | 1,0 |
| VFD-350P-230 | 100 | 0,98 | 0,83 |
| VFD-200C-230 | 95 | 1,1 | 0,9 |
| VFD-350C-230 | 100 | 0,96 | 0,83 |
| VFD-750C-230* | – | – | ≤3,3 В |
* VFD-750C-230 имеет встроенный термистор. Рекомендуется отключать вход ШИМ, если напряжение на выводе 3 разъема CN93 превышает 3,3 В.
Сигнал FAULT (ошибка, неисправность) свидетельствует о сбое в работе системы защиты от перегрузок и коротких замыканий. Эта система должна срабатывать в течение короткого времени (не более 1 микросекунды) после возникновения состояния перегрузки на выходе драйвера, когда величина выходного тока превышает уровень в 200% от номинального значения. Если система защиты не срабатывает за определенное время (tсраб. на рисунке 9), вырабатывается данный сигнал ошибки низкого логического уровня для оповещения внешних устройств контроля и управления о наличии проблемы.
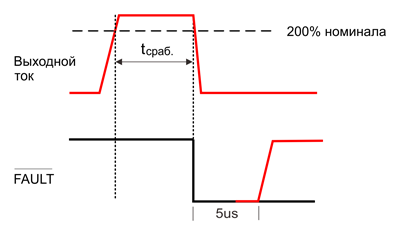
Рис. 9. Формирование сигнала FAULT
В состав всех драйверов семейства VFD входит вспомогательный источник питания, обозначенный на рисунках 4 и 5 как “AUX POWER”, а его выход (“VCC”) используется для питания внешних устройств контроля и управления.
Основные технические характеристики драйверов семейства VFD представлены в таблицах 3, 4 и 5.
Таблица 3. Основные технические характеристики драйверов VFD открытого исполнения с питанием от источника постоянного тока
| Параметр | VFD-150P-48 | VFD-250P-48 | VFD-350P-48 |
|---|---|---|---|
| Диапазон входных напряжений постоянного тока, В | 20…55 | ||
| Типовой входной ток при напряжении питания 48 В, А | 3,5 | 5,6 | 8,5 |
| Номинальная мощность, Вт | 150 | 250 | 350 |
| Номинальный выходной ток (по одной фазе), А | 4,3 | 7,2 | 10,0 |
| Пиковый выходной ток длительностью до 5 секунд (по одной фазе), А | 8,6 | 14,4 | 20,0 |
| Коэффициент полезного действия, % | 93 | 93 | 92,5 |
| Логические уровни сигнала на входах PWM | высокий: > 2,6 В; низкий: < 0,8 В | ||
| Логические уровни сигнала FAULT | неактивный: > 3,0 В; активный: < 0,5 В | ||
| Частота переключения выходных ключей, кГц | 2,5…15 | ||
| Выходные параметры вспомогательного источника питания | напряжение: 15 ± 0,5 В; ток: 0,2 А | ||
| Система охлаждения | пассивная, естественная конвекция воздуха | ||
| Диапазон рабочих температур, °C | -30…70 | ||
| Габаритные размеры, ДхШхВ, мм | 101,6 х 50,8 х 28,6 | ||
| Гарантия производителя, лет | 3 | ||
Таблица 4. Основные технические характеристики драйверов VFD открытого исполнения с питанием от сети переменного тока
| Параметр | VFD-250P-230 | VFD-350P-230 |
|---|---|---|
| Диапазон входных напряжений переменного тока, В | 90…264 | |
| Диапазон частот сети переменного тока, Гц | 47…63 | |
| Типовой входной ток при напряжении питания 230 В, А | 1,3 | 2,0 |
| Типовой пусковой ток на холодном старте при напряжении питания 230 В, А | 70 | |
| Ток утечки при напряжении питания 240 В, не более, мА | 2 | |
| Типовой коэффициент коррекции мощности при напряжении питания 230 В, не менее | 0,93 | |
| Номинальная мощность, Вт | 250 | 350 |
| Номинальный выходной ток (по одной фазе), А | 1,0 | 1,4 |
| Пиковый выходной ток длительностью до 5 секунд (по одной фазе), А | 2,0 | 2,8 |
| Коэффициент полезного действия, % | 91,5 | 93 |
| Напряжение постоянного тока на внутренней шине питания, В | 380 ± 5 | |
| Частота переключения выходных ключей, кГц | 2,5…15 | |
| Выходные параметры вспомогательного источника питания | напряжение: 15 ± 0,5 В; ток: 0,1 А | |
| Логические уровни сигнала на входах PWM | высокий: > 2,7 В; низкий: < 0,4 В | |
| Логические уровни сигнала FAULT | неактивный: > 3,0 В; активный: < 0,5 В | |
| Система охлаждения | пассивная, естественная конвекция воздуха | |
| Диапазон рабочих температур, °C | -30…70 | -30…60 |
| Габаритные размеры, ДхШхВ, мм | 127 х 76,2 х 35 | |
| Гарантия производителя, лет | 3 | |
Таблица 5. Основные технические характеристики драйверов VFD закрытого исполнения с питанием от сети переменного тока
| Параметр | VFD-200C-230 | VFD-350C-230 | VFD-750C-230 |
|---|---|---|---|
| Диапазон входных напряжений переменного тока, В | 90…264 | ||
| Диапазон частот сети переменного тока, Гц | 47…63 | ||
| Типовой входной ток при напряжении питания 230 В, А | 1,1 | 2 | 4 |
| Типовой пусковой ток на холодном старте при напряжении питания 230 В, А | 50 | ||
| Ток утечки при напряжении питания 240 В, не более, мА | 2 | ||
| Типовой коэффициент коррекции мощности при напряжении питания 230 В, не менее | 0,93 | ||
| Номинальная мощность, Вт | 200 | 350 | 750 |
| Номинальный выходной ток (по одной фазе), А | 0,8 | 1,4 | 3,0 |
| Пиковый выходной ток длительностью до 5 секунд (по одной фазе), А | 1,6 | 2,8 | 6,0 |
| Коэффициент полезного действия, % | 92 | 93 | 93 |
| Напряжение постоянного тока на внутренней шине питания, В | 380 ± 5 | ||
| Частота переключения выходных ключей, кГц | 2,5…15 | ||
| Выходные параметры вспомогательного источника питания | напряжение: 15 ± 0,5 В; ток: 0,1 А | ||
| Логические уровни сигнала на входах PWM | высокий: > 2,7 В; низкий: < 0,4 В | ||
| Логические уровни сигнала FAULT | неактивный: > 3,0 В; активный: < 0,5 В | ||
| Система охлаждения | пассивная, естественная конвекция воздуха | ||
| Диапазон рабочих температур, °C | -30…70 | -30…60 | -30…60 |
| Габаритные размеры, ДхШхВ, мм | 146 х 55 х 26 | 146 х 62 х 31 | 150 х 100 х 41 |
| Гарантия производителя, лет | 3 | ||
На рисунке 10 представлена полная структурная схема системы управления трехфазным бесколлекторным двигателем на базе драйвера VFD с питанием от источника постоянного тока.
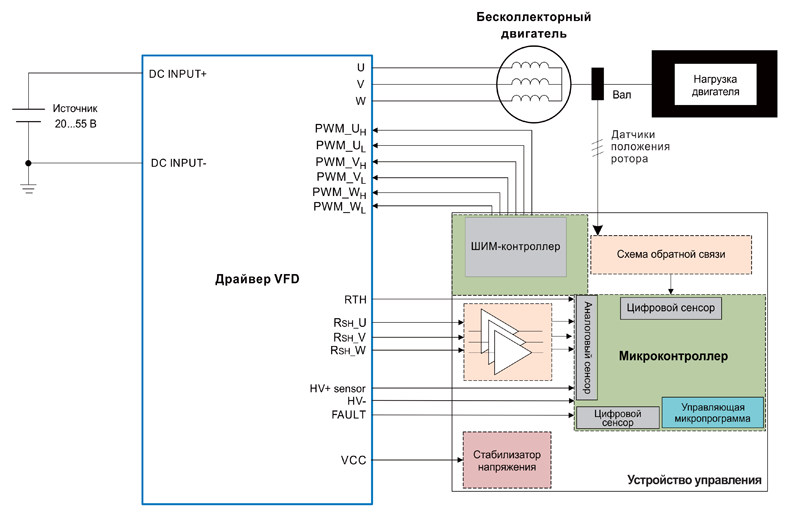
Рис. 10. Структурная схема системы управления трехфазным бесколлекторным двигателем на базе драйвера VFD с питанием от источника постоянного тока
Логику работы системы задает устройство управления на базе микроконтроллера, получающего через схему обратной связи сигналы с датчиков положения ротора (обычно это датчики Холла) и с помощью контроллера ШИМ формирующего сигналы управления драйвером. Алгоритм работы устройства управления принципиально ничем не отличается от алгоритма для модели, представленной на рисунке 1. Теоретически, такое устройство управления может быть реализовано самим пользователем, но намного проще воспользоваться готовым решением от MEAN WELL, которое специально разработано для использования совместно с драйверами семейства VFD, и которое можно легко адаптировать под использование в конкретном приложении. Это устройство под названием VFD-CB представляет собой небольшую плату с разъемами для подключения к внешним устройствам (рисунок 11).
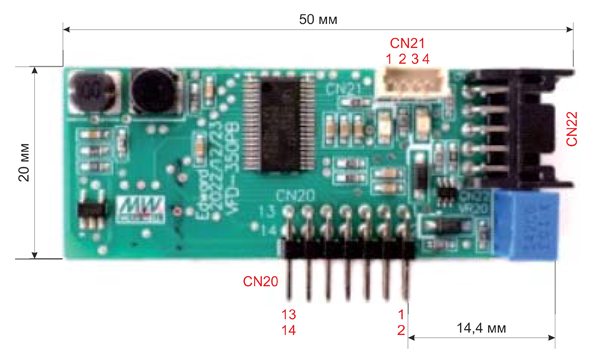
Рис. 11. Плата управления VFD-CB
Разъем CN20 платы управления предназначен для подключения непосредственно к драйверам VFD, которые имеют аналогичный ответный разъем с маркировкой CN93. Цоколевка этих разъемов представлена в таблице 6.
Таблица 6. Цоколевка разъема CN20 платы управления и разъема CN93 драйвера VFD
| Номер контакта | Обозначение | Назначение |
|---|---|---|
| 1 | DC+sensor/HV+sensor | Выход встроенного делителя напряжения, подключенного к внутренней шине питания |
| 2 | DC-/HV- | Отрицательный вывод, «земля» внутренней схемы драйвера |
| 3 | RTH | Выход встроенного температурного датчика |
| 4 | RSH_U | Выход токового датчика оконечного каскада фазы U |
| 5 | RSH_V | Выход токового датчика оконечного каскада фазы V |
| 6 | RSH_W | Выход токового датчика оконечного каскада фазы W |
| 7 | FAULT | Выход сигнала FAULT |
| 8 | PWM_WH | Вход управления верхним плечом полумоста выходного каскада фазы W |
| 9 | PWM_WL | Вход управления нижним плечом полумоста выходного каскада фазы W |
| 10 | PWM_VH | Вход управления верхним плечом полумоста выходного каскада фазы V |
| 11 | PWM_VL | Вход управления нижним плечом полумоста выходного каскада фазы V |
| 12 | PWM_UH | Вход управления верхним плечом полумоста выходного каскада фазы U |
| 13 | PWM_UL | Вход управления нижним плечом полумоста выходного каскада фазы U |
| 14 | VCC | Выход встроенного вспомогательного источника питания напряжением 15 В |
Разъем CN22 предназначен для приема входных сигналов: три с датчиков Холла и три управляющих – один аналоговый для регулировки скорости вращения двигателя и два цифровых для включения/выключения мотора и задания направления (прямое или обратное) его вращения. Также на данный разъем выводится постоянное напряжение от встроенного стабилизатора для питания внешних устройств и шины интерфейса RS-232. Цоколевка разъема CN22 представлена в таблице 7.
Таблица 7. Цоколевка разъема CN22 платы управления
| Номер контакта | Обозначение | Назначение |
|---|---|---|
| 1 | +5 В | Питание для внешних устройств с током потребления не более 0,2 А |
| 2 | Датчик Холла 1 | Цифровые входы с датчиков Холла, высокий уровень: 4,5…5,5 В, низкий уровень: 0…0,5 В |
| 3 | Датчик Холла 2 | |
| 4 | Датчик Холла 3 | |
| 5 | «Земля» | Вывод «земли» |
| 6 | Скорость | Аналоговый вход регулировки скорости вращения постоянным напряжением 0…5 В |
| 7 | Вперед/Назад | Направления вращения: +5 В – вперед, открытый контакт – назад |
| 8 | Пуск/Стоп | Запуск и остановка: +5 В – пуск, открытый контакт – стоп |
| 9 | TXD | Передача сигналов интерфейса RS-232 |
| 10 | RXD | Прием сигналов интерфейса RS-232 |
Последний разъем CN21 – порт программирования – предназначен для подключения к компьютеру по интерфейсу USB для настройки и установки параметров микроконтроллера в составе платы управления. Здесь используется контроллер IMC101T-T038.
MEAN WELL поставляет плату управления VFD-CB с уже предустановленным базовым набором параметров.
Благодаря способности платы управления к гибкой адаптации под любые типы бесколлекторных двигателей в совокупности с ассортиментом силовых элементов – драйверов – на различные мощности и типы питающих напряжений, открывается широкое поле для применения приборов семейства VFD практически везде, где необходимы электромоторы с регулировкой рабочих параметров (например, скорости и направления вращения). Характерные примеры в бытовой сфере – стиральная машина и шуруповерт, где требуются двигатели, способные вращаться в обоих направлениях с различными скоростями. В промышленности это вентиляторные установки, насосные станции, конвейерные ленты, различного рода станки и многое другое. Особое место уделяется драйверам с питанием от источников постоянного тока. Благодаря компактным размерам и малому весу (порядка 100 грамм) их можно применять в беспилотных летательных аппаратах, а мощные модели (на 250 и 350 Вт) – в электросамокатах, электрических велосипедах и самодвижущихся грузовых тележках.
Раньше считалось, что бесколлекторный двигатель – это «дорогое удовольствие», поскольку цены на электронное оборудование были слишком высокими. В наше время, благодаря выгодным решениям от MEAN WELL, это уже не является проблемой. Можно гарантировать, что семейство VFD будет пользоваться повышенным спросом у российских производителей систем управления бесколлекторными двигателями.
 Компания MEAN WELL Enterprises Co., Ltd. основана в 1982 году. В настоящее время MEAN WELL является одним из ведущих и крупнейших тайваньских производителей источников питания. Номенклатура изделий фирмы включает более 5000 наименований источников питания AC/DC, конверторов DC/DC и инверторов DC/AC, производимых на заводах в КНР и на Тайване. Продукция компании характеризуется высоким качеством, конкурентоспособными ценами и широтой номенклатуры.
Особенно хорошо представлена номенклатура исто ...читать далее
Компания MEAN WELL Enterprises Co., Ltd. основана в 1982 году. В настоящее время MEAN WELL является одним из ведущих и крупнейших тайваньских производителей источников питания. Номенклатура изделий фирмы включает более 5000 наименований источников питания AC/DC, конверторов DC/DC и инверторов DC/AC, производимых на заводах в КНР и на Тайване. Продукция компании характеризуется высоким качеством, конкурентоспособными ценами и широтой номенклатуры.
Особенно хорошо представлена номенклатура исто ...читать далее
Наши информационные каналы